


Inter peritissimos FA One-stop suppeditatores in Sinis sumus. Inter producta nostra praecipua sunt motor servo, capsa planetaria, inversor et PLC, HMI. Inter marcas numerantur Panasonic, Mitsubishi, Yaskawa, Delta, TECO, Sanyo Denki, Scheider, Siemens, Omron et cetera. Tempus traditionis: Intra 3-5 dies laboris post acceptum solutionis. Modus solutionis: T/T, L/C, PayPal, West Union, Alipay, Wechat et cetera.
Detalia Specificationis
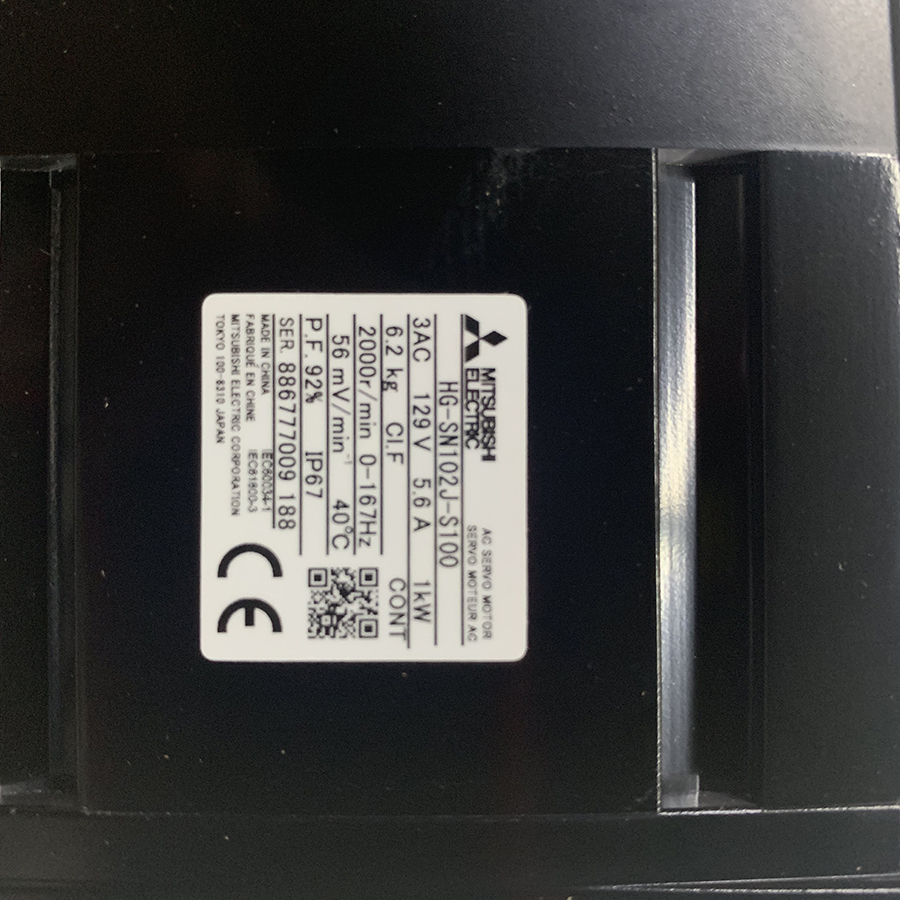
| Res | Specificationes |
| Modellum | HG-SN102J-S100 |
| Nota | Mitsubishi |
| Nomen producti | Motor servo AC |
| Potestas | 5.0kW |
| Tensio electrica | 400V |
| Frequentia | 900 (KHz) |
| Series productorum / nomen familiae | Series MELSERVO JE |
| Current aestimatus | 5.6A |
| Potentia activa aestimata | 1000W / 1kW |
| Gradus tutelae | IP67 |
| Maxima intensitas | XVII A |
| Onus radiale maximum | 980 N |
| Onus axiale maximum | 490 N |
| Momentum torquens nominale | 4.77 Nm |
| Momentum torquens maximum | 14.3 Nm |
| Resolutio | 17-bit |
| Magnitudo | 130mm × 130mm × 132.5mm |
| Pondus netum | 6.2 chiliogrammata |
Signum constans alternans (AC) ut input ad convolutionem principalem statoris praebetur. Attamen, ut nomen indicat, convolutio moderatrix tensione moderatrice variabili praebetur. Haec tensio moderatrix variabilis ab amplificatore servo obtinetur. Hic notandum est, ut campus magneticus rotans sit, tensionem ad convolutionem moderatricem applicatam 90° a phase a tensione alterna input esse debere.
Rotor: Rotor plerumque duorum generum est; unus est generis caveae sciuri, alter vero generis crateri tractilis.
Genus rotoris caveae sciuri infra demonstratur: rotor caveae sciuri. In hoc genere rotoris, longitudo magna est, diameter autem parvus, et ex conductoribus aluminio constructus est, ergo minus ponderis. Notandum est hic proprietates momenti et celeritatis motoris inductionis normalis habere regiones inclinationis tam positivas quam negativas, quae regiones instabiles et stabiles respective repraesentant.
Attamen, servomotores AC ita designantur ut magnam stabilitatem habeant, itaque eorum characteristicae momenti-lapsus regionem lapsus positivi non habere debent. Una cum hoc, momentum torquens in motore evolutum lineari modo cum celeritate minui debet.
Ad hoc assequendum, resistentia circuitus rotoris magnum valorem habere debet, cum inertia humili. Ob hanc causam, dum rotor construitur, proportio diametri ad longitudinem minor servatur. Spatia aerea inter virgas aluminii in motore caveae sciuri reducta reductionem in currenti magnetizanti faciliorem reddunt.
De serie J4 Mitsubishi:
Ut ampliori applicationum varietate, inter quas sunt fabricationes semiconductorum et LCD, robota, et machinae ad cibum praeparandum, respondeat, MELSERVO-J4 cum aliis lineis productorum Mitsubishi Electric, ut moderatoribus motus, retibus, terminalibus operationum graphicarum, moderatoribus programmabilibus, et pluribus, coniungitur. Hoc tibi libertatem et flexibilitatem praebet ad systema servo magis provectum creandum.
-De J5 Mitsubishi Series:
(1) Progressivitas
Ad evolutionem machinarum
Augmentum perfunctionis
Standardizatio programmatis
(2) Coniunctio
Pro systemate flexibili
Configurationes
Integratio cum instrumentis coniungibilibus
(3) Usus
Ad celerem operationis initium
Augmentatio instrumentorum
Usus systematis impulsoris emendatus
(4) Sustentatio
Ad celerem detectionem et
diagnosis defectuum
Sustentatio praedictiva/praeventiva
Cura correctiva
(5) Hereditas
Ad usum existentium
(6) instrumenta
Intercambiabilitas cum prioribus
(7) generationis exempla
-De JET Mitsubishi Series
-De JE Mitsubishi Series
-De JN Mitsubishi Series










